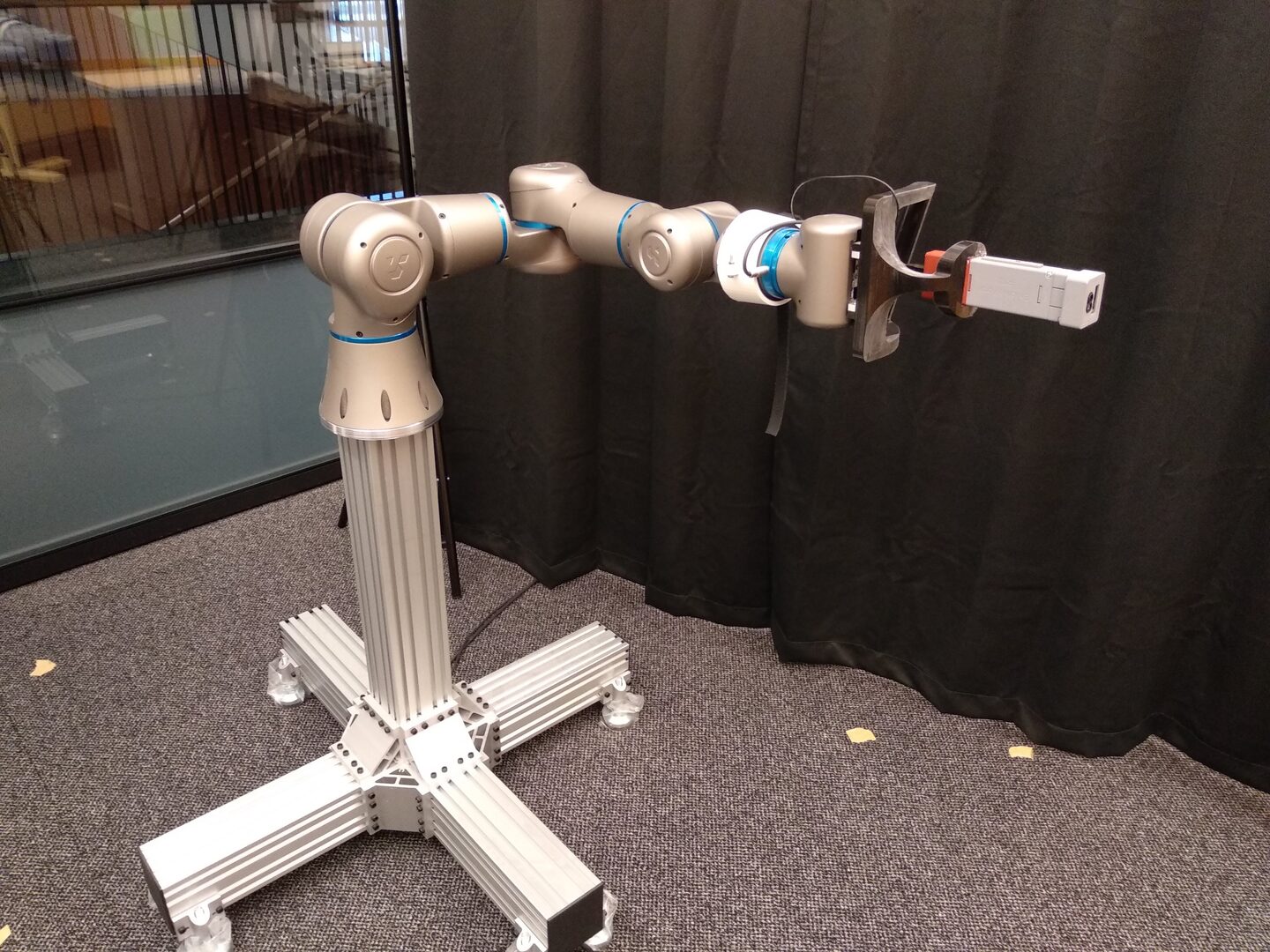
Torobo Arm
Torobo Armは、ロボット工学研究用に構築された重さ19 kgの装置です。可動範囲が+/- 110°~+/- 170°の6つの関節と、グリッパーを有しています。
ヒトを被験者とする実験では、ROS(ロボットオペレーティングシステム)ライブラリーを使用して、PC上のPythonでロボットアームをプログラムします。PCはUSBケーブルを介してロボットのマスター・コントローラーに接続されます。本ユニットの現在の実験設定では、被験者がロボットアームと相互作用できる以下の2つのモダリティーを検討しています。
- 外力:被験者が能動的にロボットアームの動きを制御すると、リアルタイムの軌道データ(関節位置および角度速度)がPCに送信され記録されます。
- 軌道モード:ロボットアームが過去に記録された起動データを再生し、同一被験者または別の被験者がそれを経験できます。
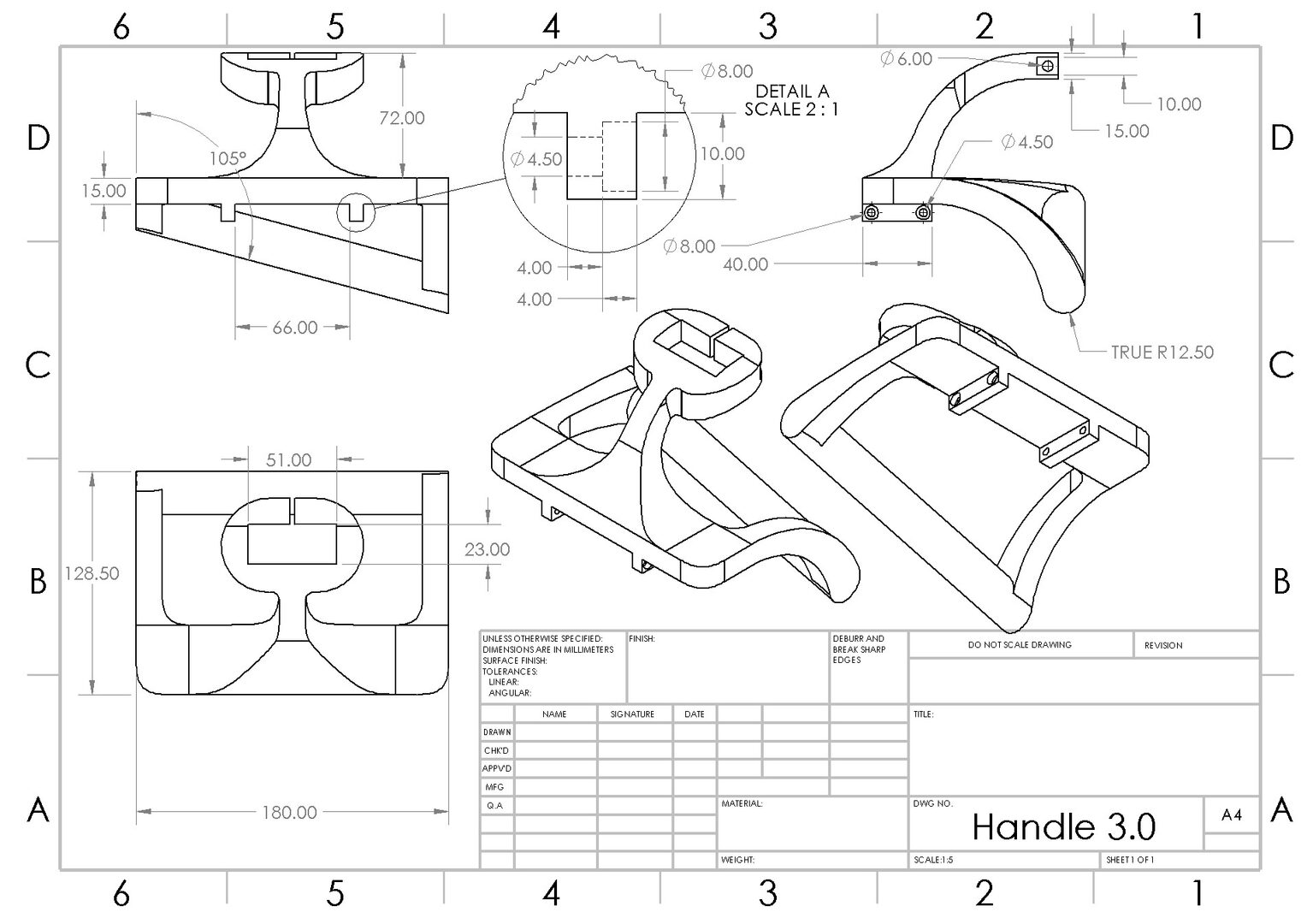
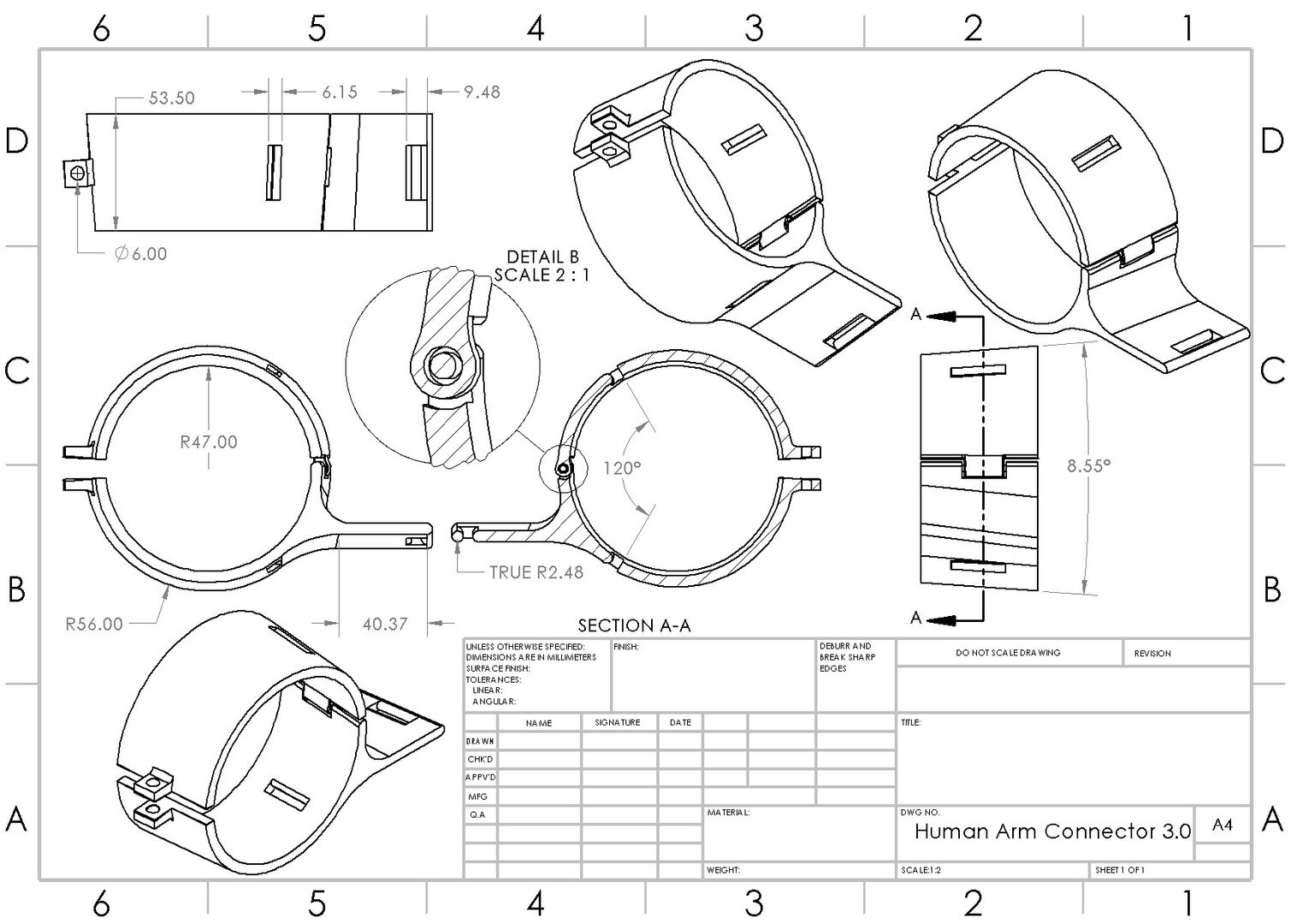
さらに、本ユニットは、カスタムのグリッパーを構築する専門知識を有しており、グリッパーを交換して被験者とロボットアームの相互作用をコントロールすることができます。