認識における行為主体性 Agency in Perception
認知科学および人工知能(生態心理学、エナクティビズム、能動的知覚)のいくつかの研究では、認識がカメラ記録のような環境からの情報の受動的な取り込みとは異なるということが強調されています。認識はむしろ、行為主体が有機体的および情報的必要性を満たすために環境を探索する、能動的なプロセスです。この考えによると、行為主体が適切に認識するためには、行為主体による認識入力の操作が必要となります。このことは従来の研究でも、視覚(Held & Hein, 1963)や触覚(Heller, 1986)などの多くの感覚モダリティーにおいて示されています。
しかし、具体的にどのような行動が認識に寄与するのか、さらに一般的に、行為主体のどのような特性がいつ問題となるのかということは明らかにされていません。例えば、能動的な探索は、認識の学習にのみ不可欠なのでしょうか、実際のすべての認識行為にも不可欠なのでしょうか。あるいは認識作業が複雑な場合にのみ重要なのでしょうか。能動的認識がより優れているのは、それが固有受容や運動指令のような追加的な情報源を含むためなのか、動的な入力パターンを生じるためなのか、あるいは行為主体の継続的な目標に特化した情報を得ることができるためなのか。
本プロジェクトでは、能動的活動の認識における役割に関する既存の報告の系統的調査と、能動的認識モデルと受動的認識モデルをできる限り詳細に比較することを目的とした実験の2種類の方法でこれらの問題に取り組みます。
系統的調査
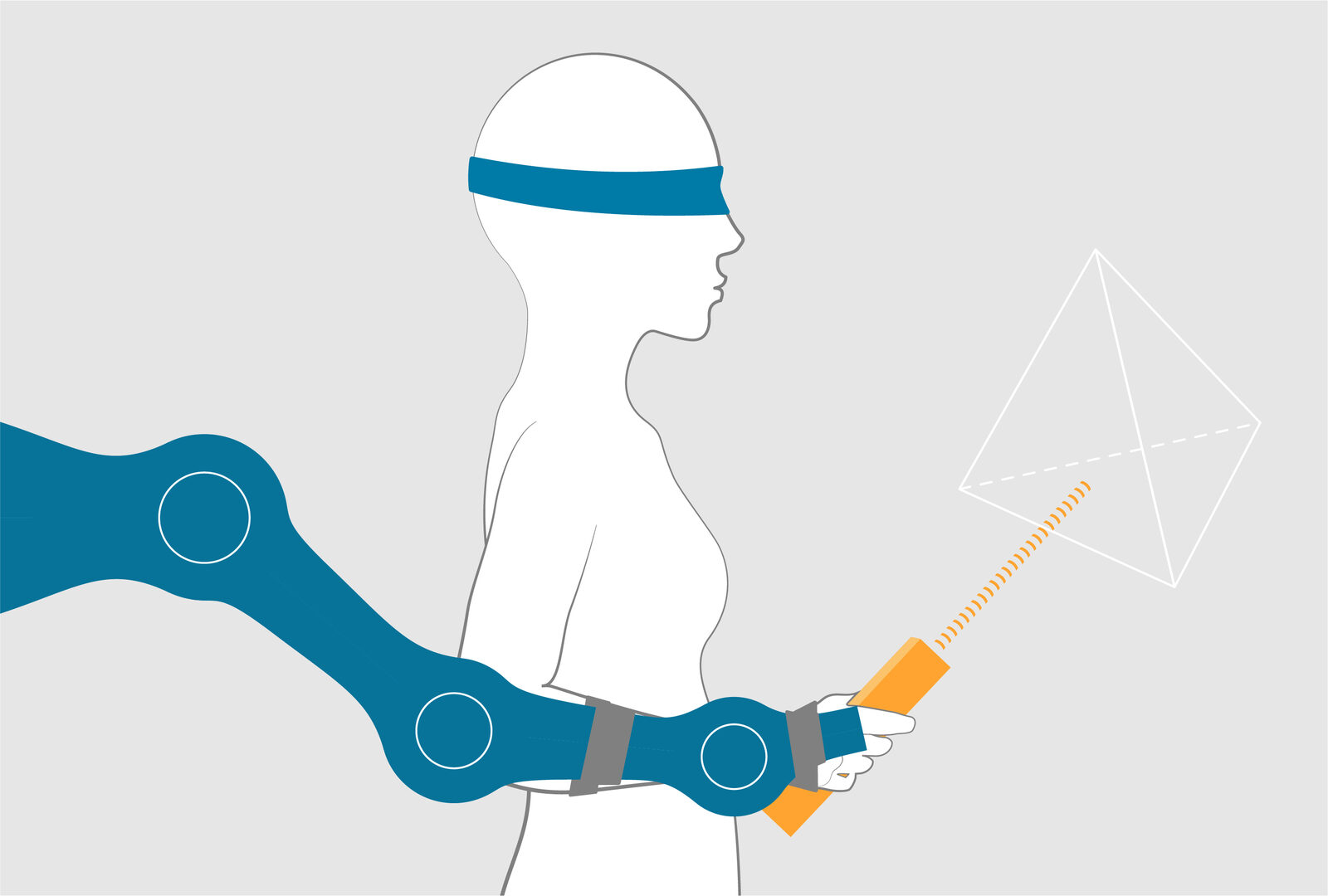
生態心理学の誕生以降、非常に多くの研究により、能動的認識と受動的認識の質が比較されてきました。例えば、目隠しされた被験者に形状を認識するよう求める実験では、自分の指で形状をトレースした被験者(能動的状態)と、実験者が指を動かした被験者(受動的状態)および手のひらにすべての形状を押し付けられた被験者(静的状態)を比較します。この種の研究のいくつかからは、能動的認識状態の被験者の判断がより正確であることが示されています。しかし、全く効果が観察されないという研究も存在し、さらに他の研究では受動的認識の方が有益であるという結果が得られています。
系統的調査により、同一の現象を検討した多数の研究を収集することができ、それらの結果の不一致の理由を理解する試みが可能となります。本ユニットでは、能動的認識が全体として受動的認識より正確であるかどうか、また受動的認識が能動的認識と同等またはそれ以上に正確であると主張する研究結果がタスクおよび実験またはそのいずれかの特性に起因するものであるかどうかを明確にすることを目指します。
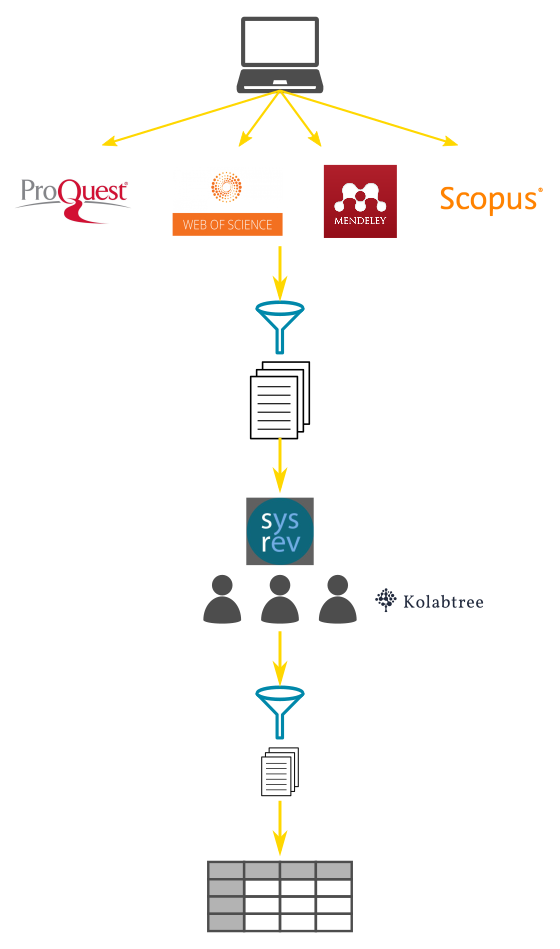
本ユニットの系統的調査では、(1)関連する可能性のある文献を同定するための多数のデータベースのプログラム化した検索およびフィルタリング、(2)関連する可能性の高い文献を事前にラベルするためのフリーランス専門家へのクラウドソーシングおよび(3)詳細なデータ抽出およびメタ解析を組み合わせます。
視覚代替
能動的認識の有益性に関する異なる研究において矛盾した結果が得られるのは、一部には能動的条件と受動的条件の一致の程度の制御が不十分なためであると考えられます。理想的には、一度に操作する能動的認識の特性を一つに限定する、または少なくともどの特性が操作されているかを完全に理解することが望まれます。
例えば、被験者の指を実験者が動かす研究の場合、その被験者が暗黙のうちに実験者の指示に能動的に従っていることがないと言い切れるでしょうか。それが明確でない状態では、能動的条件と受動的条件間に差が観察されなくても、それが、能動的認識が受動的認識よりも実際に優れていないせいなのか、単にいずれの条件でも運動活性が存在しているという事実によるものなのか知ることはできません。
本研究では、ロボットアームであるToroboを使用して、被験者が異なる認識タスクを能動的に解決する(能動的状態)場合の軌道を記録し、全く同一の軌道を対応する被験者(受動的状態)に再現します。両条件において、筋肉活動も記録します。これによって、両条件の差が明示的に操作する条件の差のみであることを確信できると考えられます。